










更新日:2020年5月2日
ドローンを飛行させるために必要な作業の一つ「コンパスキャリブレーション」について説明、行う方法を紹介します。

目次
1.コンパスキャリブレーションとは
ドローンが正確な方向・方角など方位を取得し、より安全に飛行するために行う作業のことです。
本格的なドローンになるとGPS内臓で位置情報もしっかり掴めているはずですが、ドローン自身がどの方角を向いているのか見失ってしまうことがあります。
そのため、「どの方角をみているのか」をドローンに把握させることが大事です。
ドローンは周辺に磁気を乱すものが近くにあると飛行できません。画面に「コンパスキャリブレーションが必要です」と表示がされている間は飛行できないので、磁気干渉を起こさない場所を探してドローン本体を移動させましょう!
磁気干渉起こさない開けた場所に移動しても、磁気干渉エラーが出て解消されない場合は、無理に飛行させず、コンパスキャリブレーションを行いましょう。
※ドローン本体に内蔵された電子コンパスで方角を認知するため、コンパスキャリブレーションは、閉鎖的な場所や建設現場、鉄鋼建築物など磁気干渉を受ける可能性がある場所は避けて行ってください!
2.自主的に行う方法
キャリブレーションを設定から行う方法です。
障害物のない開けた場所でキャリブレーションを行ってください!
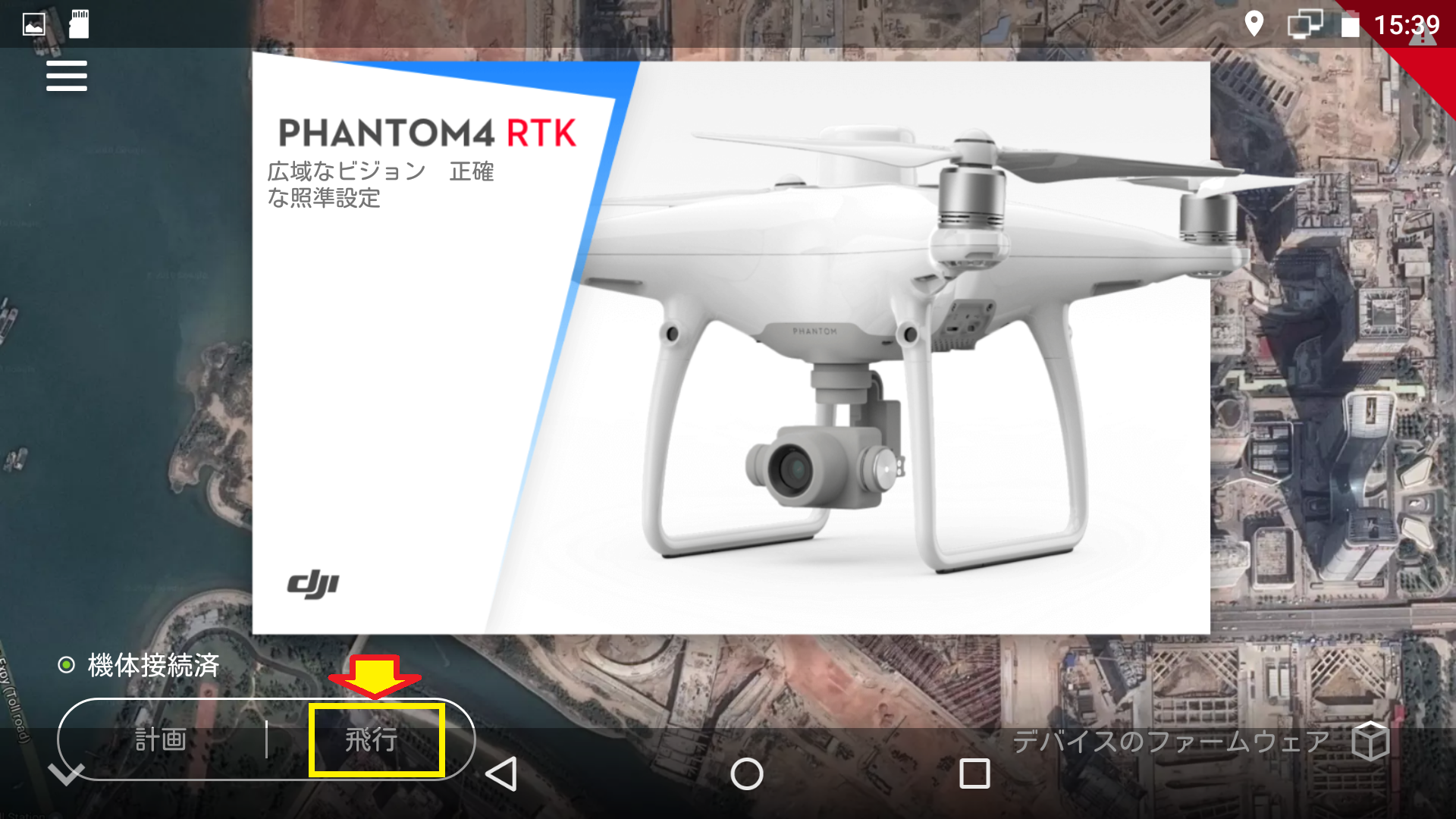
①送信機で「GS RTK」を開き、「飛行」を押す
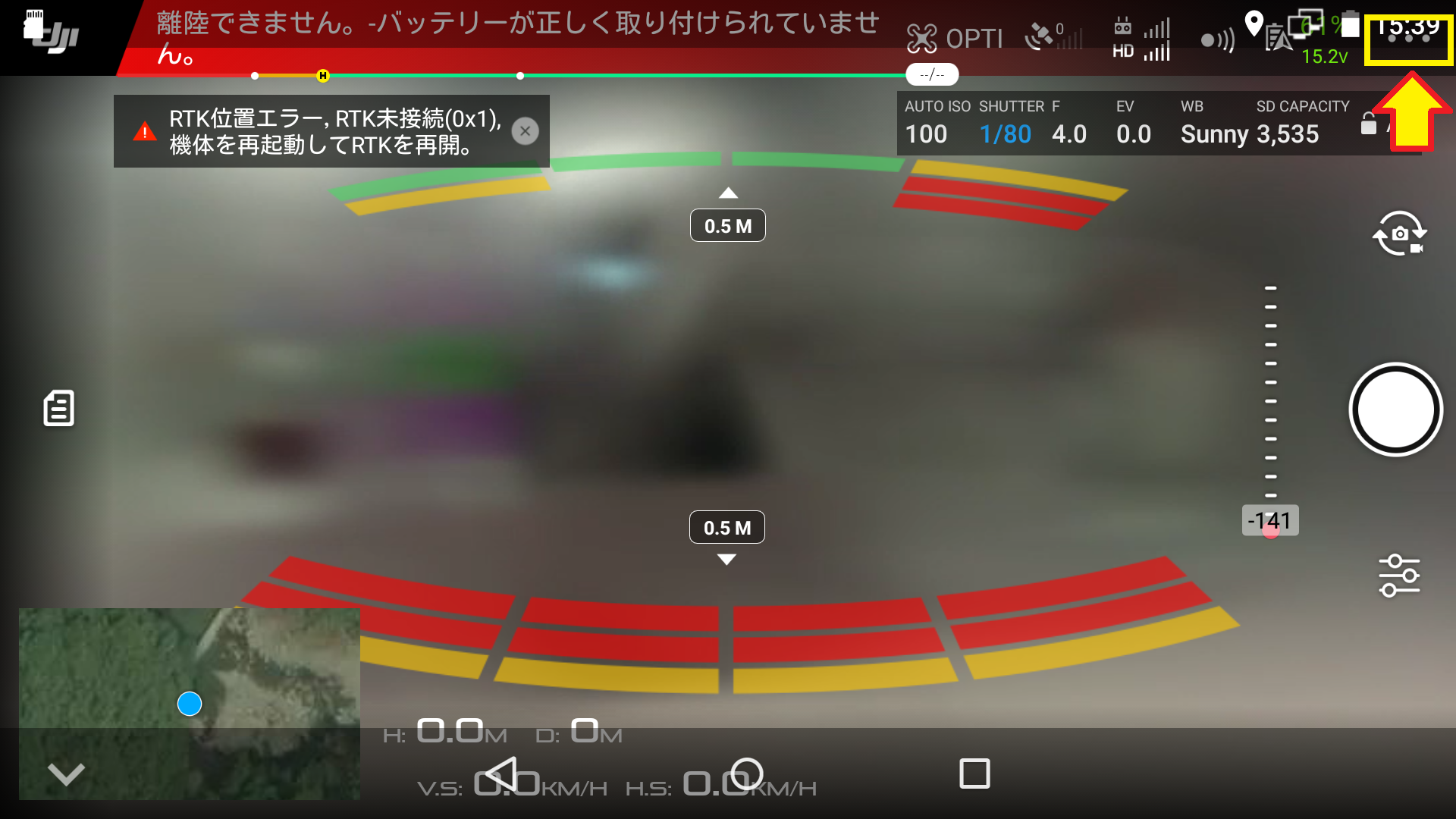
②「機体の設定」を開く
右上「・・・」の一番上の「機体の設定」を開きましょう。※時計の後ろに表示されることもあります。
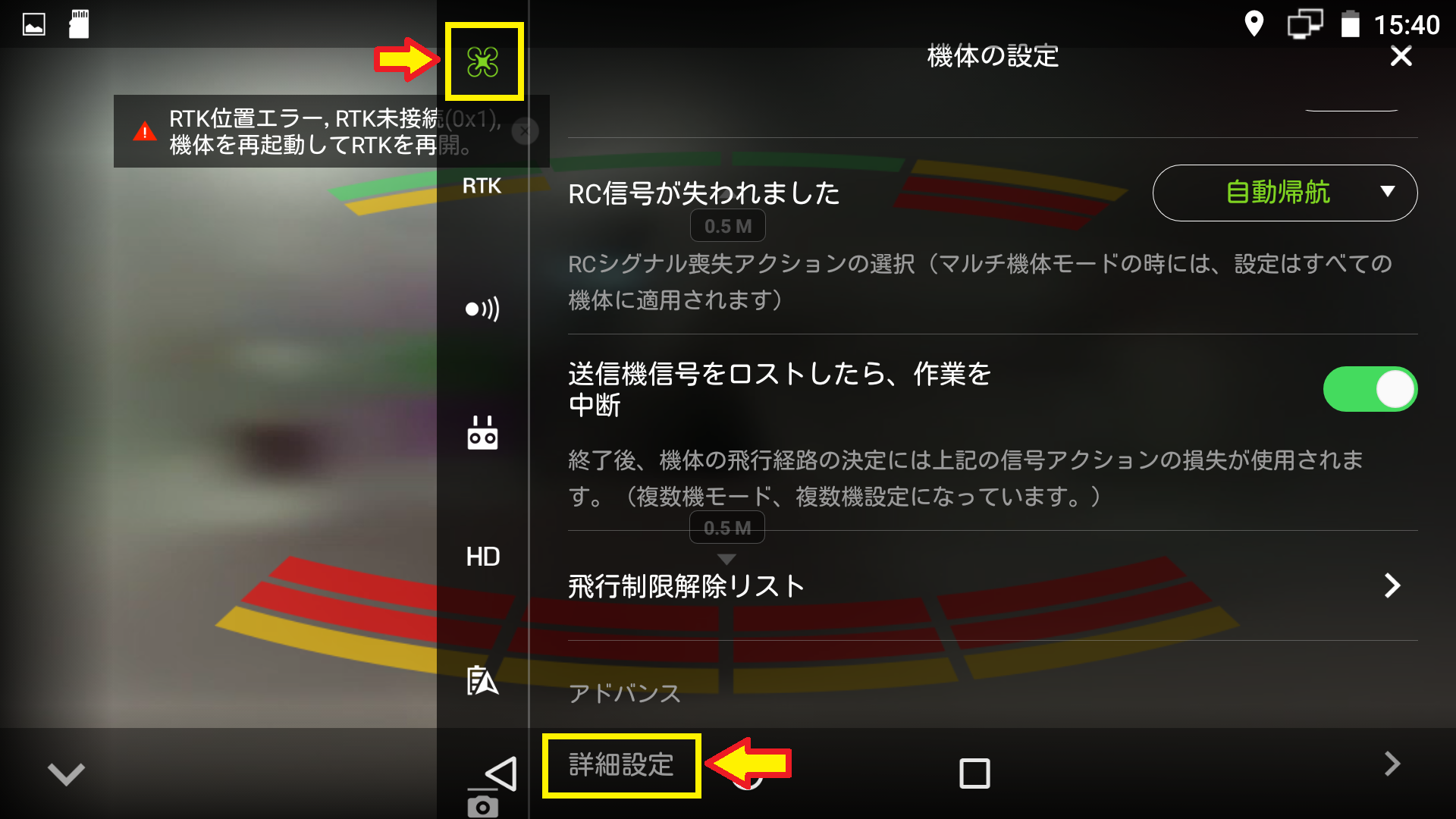
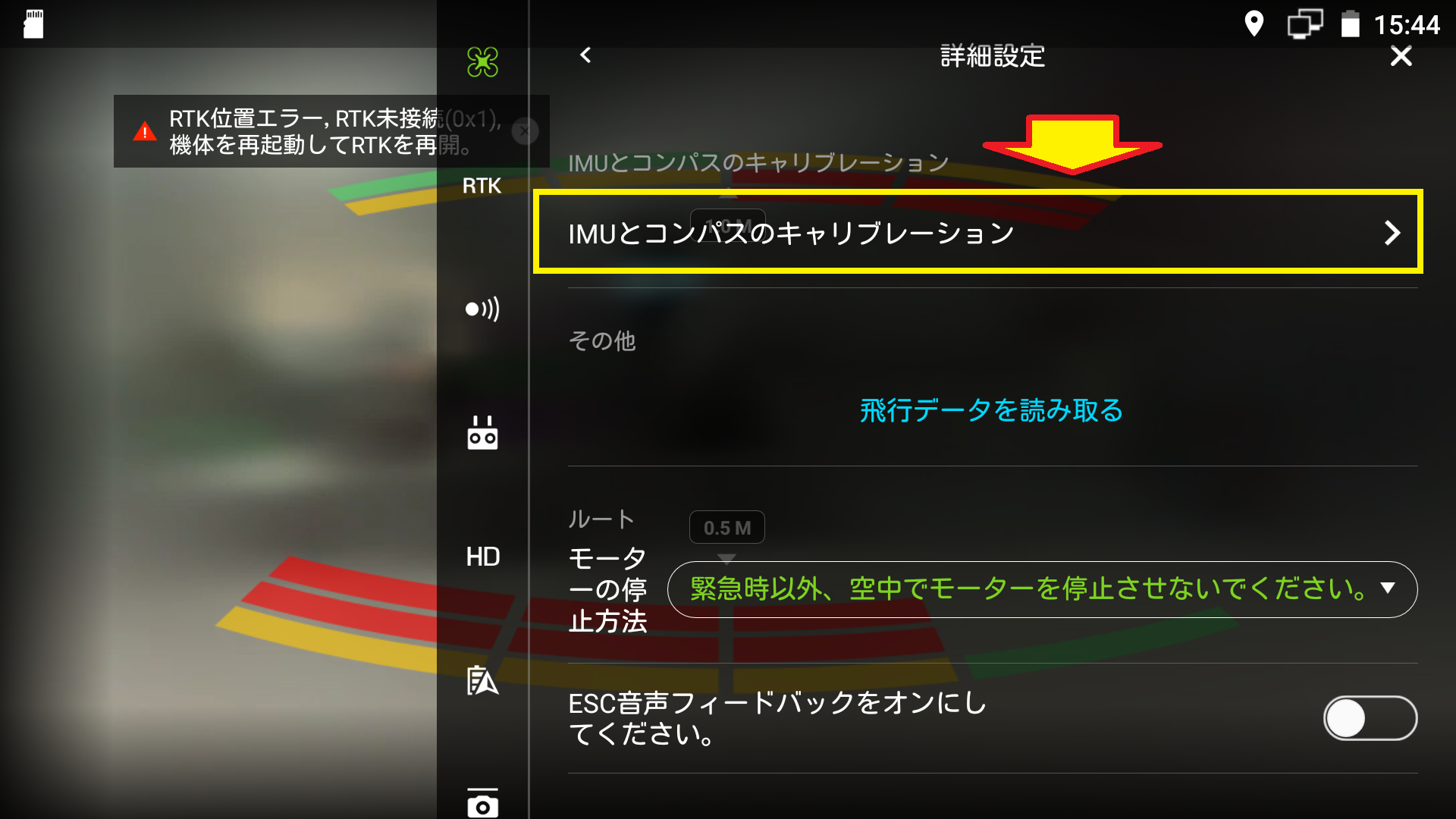
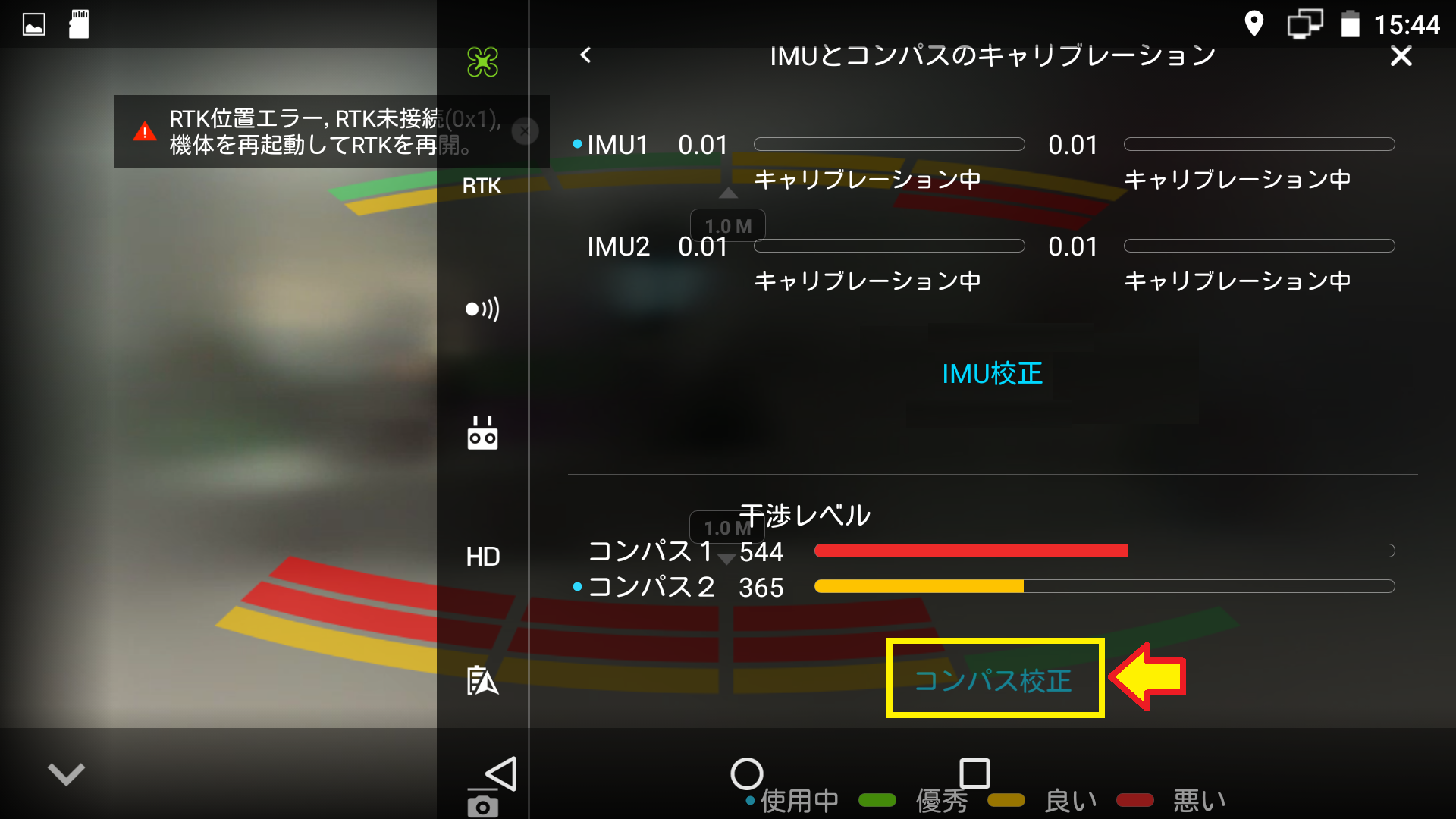
③詳細設定を開き「IMUとコンパスのキャリブレーション」を開きます。
機体の設定の1番下にある「詳細設定」を開きましょう。
続いて「IMUとコンパスのキャリブレーション」を開きます。
④「コンパスキャリブレーション」を行う
「IMU較正」「コンパス校正」と青文字2つ出てきますので、それぞれキャリブレーションを行います。
画面に指示が出てきますので、指示に従って進めてください。
【IMU校正】
平らなところを機体を置いてキャリブレーションを行ってください。指示通り進めましょう。

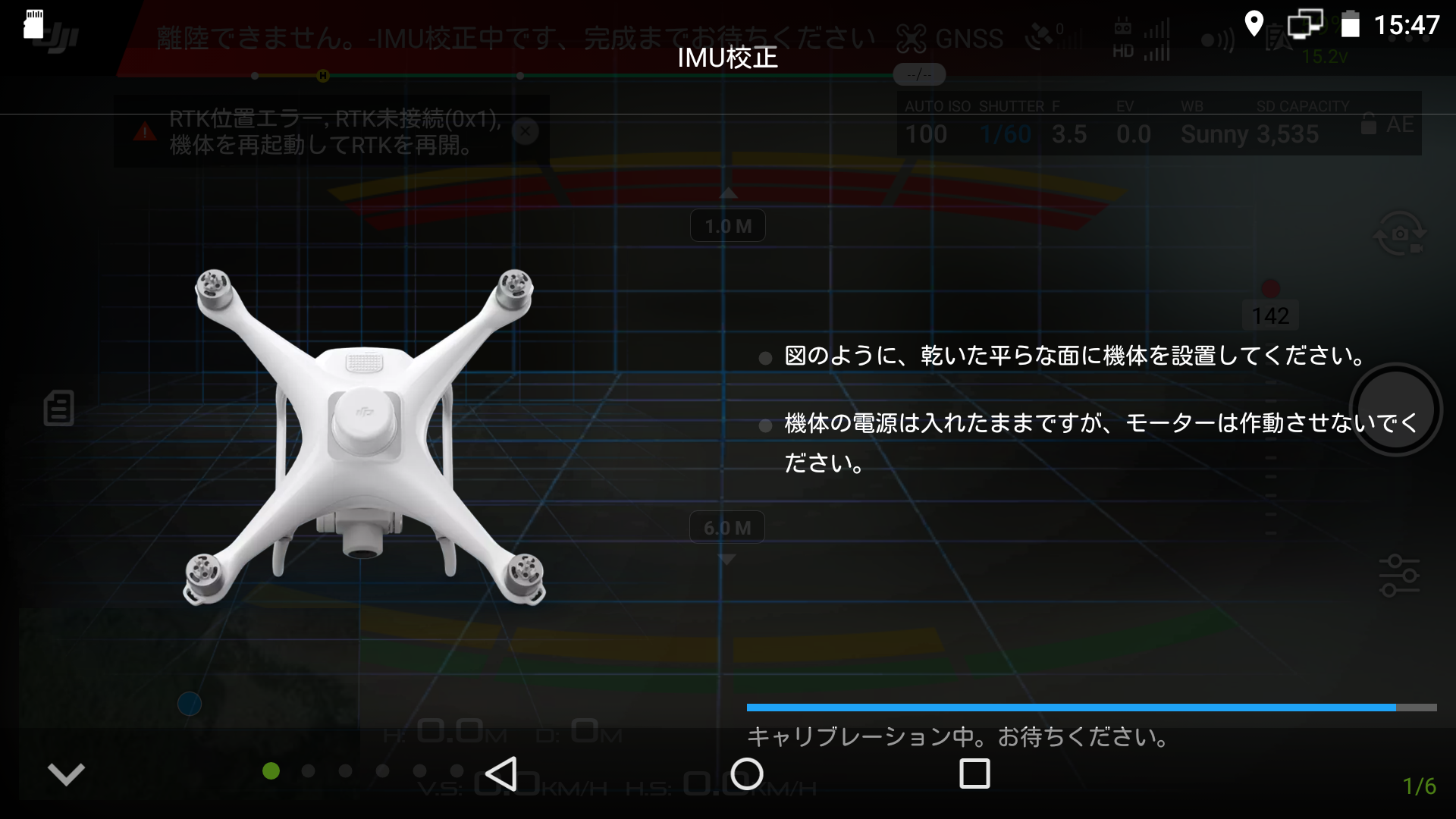

上図のように、画面の指示通りに平らなところに機体を置いてキャリブレーションを進めてください。
キャリブレーション中は赤に点滅し、キャリブレーション完了すると緑に変わります。
すると、次の指示が出てきますので、どんどん進めましょう。

指示通りに進めていき、この画面になったら、手動で機体の再起動を行ってください。
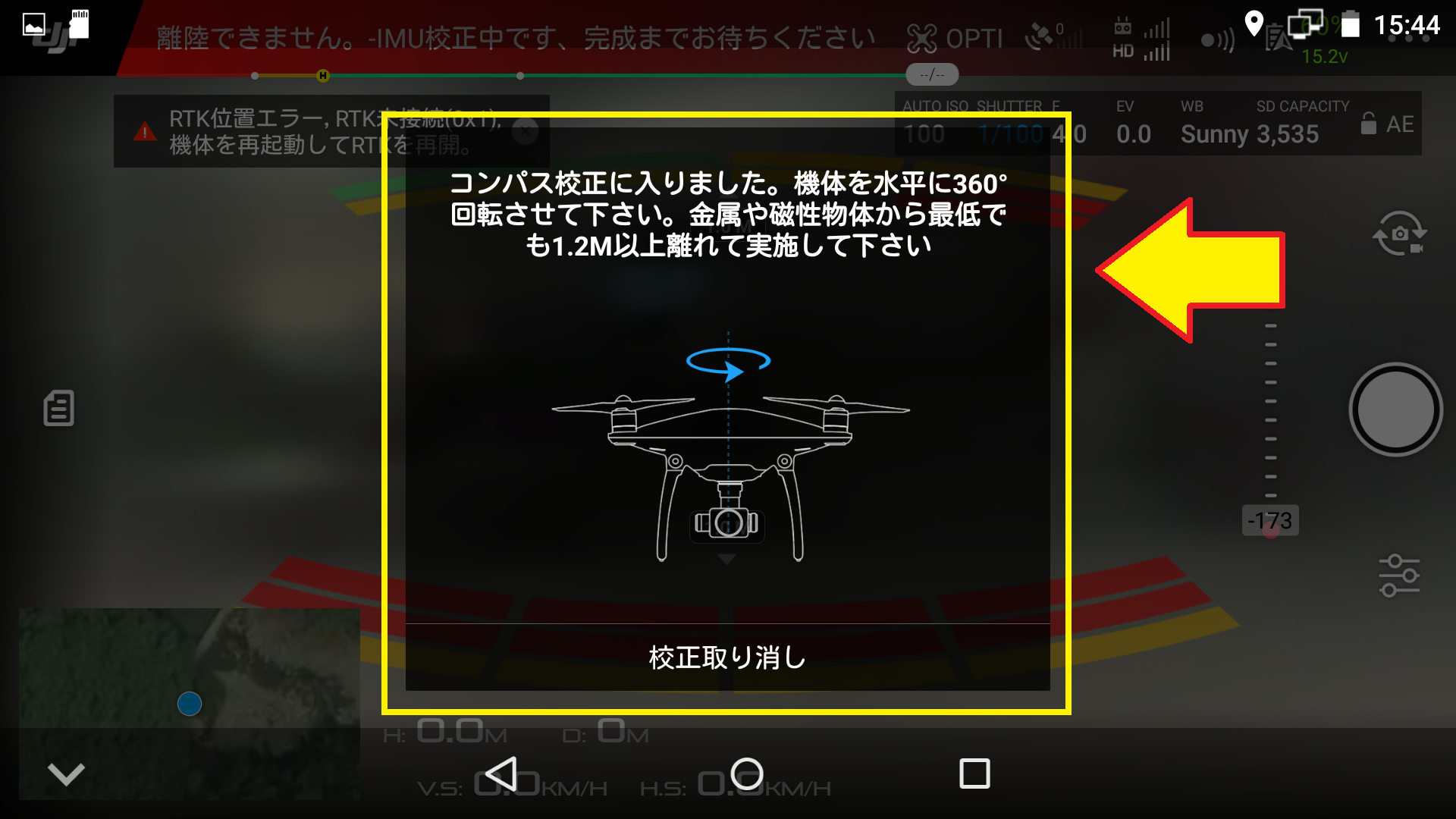
【コンパス校正】
こちらも画面上に指示が出てきますので指示通り進めましょう。
機体を持って回転させ、キャリブレーションを行いますが、地面からあまり離れていなかったり磁気干渉するものが近くにある場合は失敗することがあります。開けたところで行いましょう。
※うまくキャリブレーションができなかった場合は再度指示が出てきますので、指示通りに進めてキャリブレーションを完了させてください。
3.画面に指示が出て行う方法
アプリまたはステータスインジケーターから促された場合の実施方法です。
自主的に行う時と実施する内容は変わりありません。
①キャリブレーション手順
1:アプリの機体ステータスバーから「キャリブレーションを実施する」を選択。画面指示に従いましょう。
2:期待を水平に保ち、360度回転。機体ステータスインジケーターが緑に点灯したらOKです。
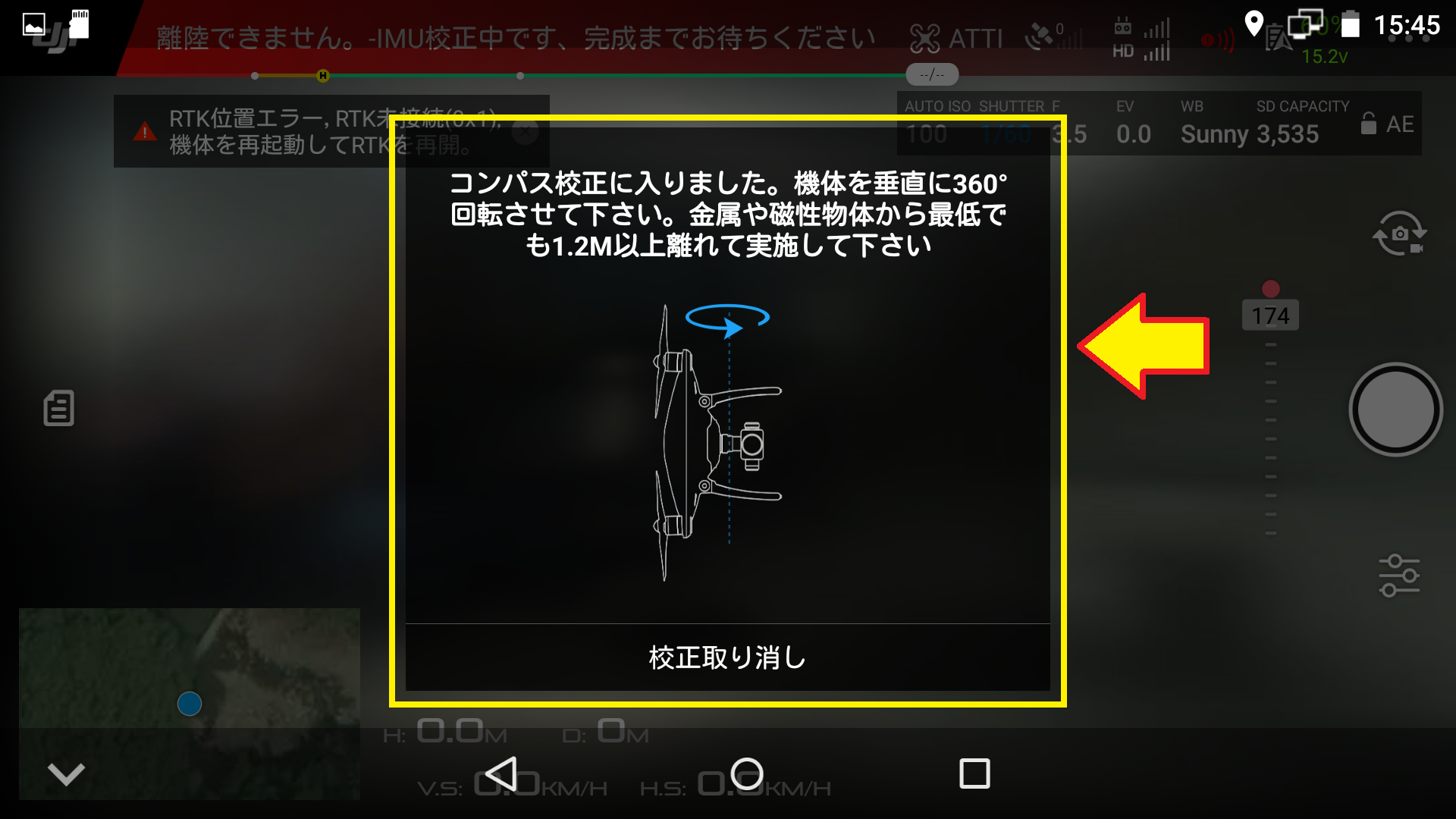
3:機体の機首を下に向けて機体を垂直に保ち、中心軸周りに360度回転。インジケーターが緑に点滅したらキャリブレーションの完了です!
機体ステータスインジケーターが赤色に点滅した場合は再度実施してください。